Lessons in Autonomous Transit: WRTA’s Fixed-Route AV Demonstration Project
10 minutes Date Launched/Enacted: Mar 2, 2026 Date Published: March 3, 2026

Summary
- The ELATE project is a mobility demonstration project led by WRTA in Youngstown, Ohio, and VTA in Santa Clara, California, to test the feasibility of deploying autonomous, electric transit vehicles in fixed-route environments.
- The project, supported through the FTA Accelerating Innovative Mobility program, was designed to evaluate AV technology across two distinct environments: the smaller, colder-weather, and lower-density area of Mahoning County, Ohio, and the larger, warmer, and more urbanized area of Santa Clara County, California.
- Unlike many AV demonstrations focused on closed or low-complexity settings, WRTA and VTA attempted to integrate automation into an active fixed-route service requiring interaction with live traffic and real-world passenger activity.
- The project faced significant vendor and supply chain disruptions, highlighting the limited and evolving market for transit-ready AV platforms.
- WRTA’s experience showed that while fixed routes are predictable geographically, real-time passenger detection, boarding activity, and accessibility support remain operational challenges for current AV systems.
- The ELATE project demonstrates both the promise and the present limitations of automated transit, as well as the value of adaptability and peer exchange.
![]()
This project is part of the Mobility Innovation Collaborative (MIC). The MIC provides a comprehensive suite of technical assistance resources, promotes knowledge sharing activities, and captures stories and lessons learned from innovative mobility projects across the United States.
Originally published March 2026.
Introduction
AV1’s Route 29. Credit: WRTA
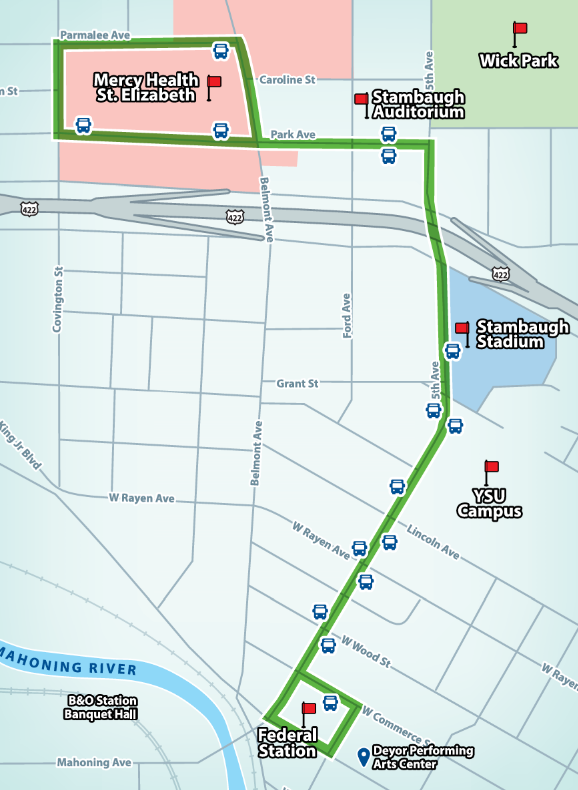
The Western Reserve Transit Authority (WRTA), which serves the Mahoning County area around Youngstown, Ohio, is a relatively small agency in a mid-sized city. WRTA operates a fleet of about 55 standard public transit buses and 25 smaller cutaway vehicles for paratransit and other demand-response service. Together, they provide about 2 million trips annually to a population of 430,000 residents across their metro area. In 2025, WRTA began operating an ambitious pilot: a fixed-route, autonomous vehicle (AV) service known as AV1. The service was part of the larger multisite Enhancing Life with Automated Transportation for Everyone (ELATE) project, funded by the Federal Transit Administration (FTA)’s Accelerating Innovative Mobility (AIM) program. AV1 operates as a fixed-route system on WRTA’s Route 90, making a total of fifteen stops, with terminals at Mercy Health St., Elizabeth Hospital, and Federal Station, which connects to a Greyhound station and other local routes. Along the way, the bus also stops at local landmarks, like the Performing Arts Center, Youngstown State University, Stambaugh Auditorium, and Wick Park.
The ELATE project
The ELATE project was intentionally designed to evaluate AV technology across two distinct environments: the smaller, colder-weather, and lower-density area of Mahoning County and the larger, warmer, and more urbanized area of Santa Clara County, California, served by the Santa Clara Valley Transportation Authority (VTA). This distinction is critical because different land-use patterns, climate, street geometry, traffic complexity, and pedestrian density all place different demands on autonomous systems. Testing AVs in both snowy winters and mild, semi-dry climates, in downtown traffic grids and on suburban arterials, and within two very different transit environments, offered a unique opportunity to understand how the same technology stack behaves under divergent operating conditions. This dual-context design is unusual in AV pilots and represents a key strength of the ELATE project. By jointly piloting the same vehicle and automation platform, WRTA and VTA created a model that fosters peer exchange across the transit industry. The ELATE project was different from other AV deployments in several ways. Mainly, it provided a fixed-route service rather than an on-demand service. While the project was initially planned to pilot a smaller autonomous shuttle, changes in the vendor landscape required WRTA to pivot to a different vehicle platform during implementation. Unlike many AV pilots that rely on small shuttles or cars with limited passenger capacity, WRTA ultimately deployed an AV-equipped electric vehicle that is retrofitted by Sunset Vans, better known as the RAM- Electric Minibus. These specialized EVs can accommodate 8-10 passengers. This shift allowed WRTA to explore how a slightly larger vehicle performs in a fixed-route context. In the case of a service like this, fixed-route operations present a layer of unpredictability when compared to that of AV on-demand services. While the routing does not have to be dynamically updated as with an on-demand service, fixed-route services make frequent stops, deal with unpredictability in the number of boardings and alightings at any given stop, and must be prepared to accommodate passengers with wheelchairs or other mobility challenges.
From the outset, WRTA and VTA faced substantial procurement and technology hurdles that reflect common challenges in adopting new technologies in the transportation industry. However, these barriers highlighted the value of a demonstration project and how it can build valuable documentation for other agencies to take away the pros and cons of a certain technology. For instance, WRTA’s experience of navigating procurement challenges, adapting to new vehicle models, and aligning vendor capabilities demonstrates how small and mid-sized agencies can contribute to lessons that can help the AV industry evolve toward greater reliability, accountability, and operational readiness.
Challenges and Shifting Timelines
The development of the AV1 service unfolded across a long series of shifting challenges and milestones, each influenced by external disruptions, procurement complications, and unexpected technical hurdles. While the ELATE concept originated several years earlier and was selected for FTA funding in 2020, the agency originally set August 2024 as the date when the shuttle would begin operating in downtown Youngstown. However, a combination of supply chain issues, vendor changes, and mechanical complications ultimately pushed the launch beyond that target.
From the beginning, ELATE challenged both WRTA and VTA, starting with COVID-era supply chain disruptions that delayed vehicle delivery and forced both agencies to re-evaluate vendor partnerships. When the originally planned vehicle became unavailable, the project team had to identify a different electric model and work with a new technology vendor capable of rebuilding the entire AV technology stack for an unfamiliar platform. Although WRTA initially partnered with First Transit as part of its AV deployment team, upstream vehicle supply constraints (including the limited availability of Buy America-compliant electric vehicles suited for automation) ultimately prevented the delivery of an immediately ready AV bus on the original timeline. These challenges were driven primarily by vehicle manufacturing and procurement limitations rather than agency operations or project management. This problem wasn’t unique to WRTA, as multiple US transit agencies experienced similar disruptions, particularly for specialized or low-volume vehicles such as electric shuttles, cutaways, or prototype AV platforms. In some cases, agencies postponed their pilots entirely, while others took the same route as WRTA and attempted to improvise by reshuffling existing procurement orders or accepting delayed delivery schedules.
Despite this setback, WRTA decided to keep the AV1 program moving forward by choosing to transfer an electric vehicle already on order from a different project in a different region. This adaptation allowed WRTA to retain compliance with federal procurement rules, but introduced a new technical complication downstream. The AV technology provider, Perrone Robotics, Inc. (Perrone), originally planned to integrate its AV stack into a different vehicle. However, when WRTA changed vehicles, Perrone had to scramble to rebuild its software and hardware systems to fit the new platform. This step effectively restarted development and added months of delay and interdependency between vehicle manufacturing and automation engineering.
Once the modified vehicle arrived on site with WRTA, new mechanical and operational problems emerged. Most notably, the bus often entered “limp mode,” which automatically shuts down vehicle operations when system irregularities are detected. For WRTA, limp mode failures were due to the interactions between Perrone’s autonomous system and the vehicle’s existing electrical and diagnostic systems, indicating that there were deeper compatibility issues between the software and hardware. Other agencies have reported similar issues when piloting autonomous shuttles or retrofitted vehicles, experiencing abrupt shutdowns or miscommunications between AV sensors and the base vehicle’s electronic control units. For example, Columbus, OH’s COTA pilot with EasyMile shuttles experienced repeated onboard system faults and emergency braking events, which led the agency to suspend operations while the vendor addressed the problem temporarily. A larger agency like COTA has engineers on-site who can work to mitigate these issues. WRTA, however, has fewer resources and internal capacity. WRTA’s experience specifically highlights how smaller agencies without dedicated engineering teams face the added complexity and delays when troubleshooting experimental systems.
The persistence of technical issues also impacted WRTA’s ability to include more complex program and evaluation components, such as rider testing, accessibility research, and fixed-route scheduling analysis. Despite setting a highly publicized kick-off for August 2024, the autonomous system was still not fully operational a year later. The AV1 team overcame the last of the technical barriers to begin service in December 2025.
Understanding the Barriers to AV Readiness
Even at an early stage of public operation, WRTA’s AV1 pilot offers a valuable look into the challenges agencies may encounter when deploying AV technology. More specifically, the experience has demonstrated how early-stage AV pilots are not only technology demonstrations, but also learning opportunities that reveal operational realities that must be addressed before wider deployment of autonomous transit.
One lesson centers on the misalignment between current AV capabilities and the requirements of fixed-route service. Autonomous driving systems still struggle with the challenge of making frequent stops to let riders on and off, responding to the unpredictable behavior of surrounding road users, and accommodating riders with varying mobility needs. Because the AV system could not predict when passengers would board or identify when someone would need extra time or assistance, a safety operator was required to disengage the autonomous driving mode at every stop. For agencies exploring similar deployments, WRTA’s experience reveals that today’s AV technology is still better suited to controlled environments or on-demand services where stop patterns and rider needs are either more limited or more predictable. Fixed-route automation may become viable in the future, but for now, agencies should expect an operational burden similar to that of on-demand systems, which includes the ongoing need for staff presence on the trip to help people with disabilities board the vehicle.
WRTA’s challenges also highlight a gap in readiness to support passengers with disabilities beyond boarding the vehicle. The AV1 vehicle cannot detect when the wheelchair ramp needs deployment, nor can it automatically secure the wide variety of wheelchairs in use. Thus, wheelchair handling remains entirely manual. Though the low-floor design includes a fold-out ramp (rather than a lift), ramp deployment and securement of mobility devices are entirely manual processes. Safety operators on board the WRTA vehicles must note when a rider needs the wheelchair ramp deployed. WRTA observed that the AV industry must focus on building technology that allows riders with disabilities to communicate accessibility needs to the vehicle at the stop or before it arrives, as well as hardware to automate or streamline the boarding/alighting and wheelchair securement processes. Until these components have a fix, human staffing remains essential.
Beyond technical and accessibility barriers, WRTA also faced capacity strain as a small agency with few staff (hiring for the pilot was the responsibility of Transdev). But both struggled to recruit and retain safety operators, largely due to illness-related absences and turnover. This is common in the AV industry, where safety operators, despite being essential to early deployments, often face irregular schedules, extended training requirements, and limited long-term career paths. Frequent staffing gaps created operational unpredictability at WRTA and delayed progress toward consistent testing and public-facing service.
Internally, the AV1 pilot placed a burden on WRTA’s staff. Because vendors were not consistently on site, WRTA’s maintenance teams performed much of the diagnostic work, troubleshooting, and repairs. In many pilots, these tasks would fall to trained technicians from the AV vendor or vehicle manufacturer. For a small agency with limited maintenance personnel and a busy operations schedule, these demands created bottlenecks and strained both the pilot and routine operations and maintenance.
Lessons Learned: Guidance for Future AV Deployments
WRTA’s experience with the AV1 pilot offers valuable guidance for transit agencies exploring the potential of AV technology in their own systems. The lessons from AV1 illustrate the current limitations of AV deployment, but can inform future pilots. Fixed-route services in particular require vehicles to manage frequent stops, unpredictable boarding and alighting behavior, and other conditions that current AV systems struggle to handle without safety operator support.
Accessibility Considerations
WRTA’s experience demonstrates that some of the largest challenges for fixed-route AV deployment are not related to routing complexity, but rather to passenger interaction at the curb and onboard the vehicle. Fixed-route services operate along predefined alignments with a known set of stops, but still require AV systems to interpret and respond to variable human behavior in real-time; AV systems must reliably detect waiting passengers and distinguish riders from bystanders, determine when a stop is being requested, and assess when boarding activities are complete. In a non-automated fixed-route transit service, this interaction would require judgment about appropriate stopping behavior, dwell duration, securement, and other passenger assistance needs (especially when concerning passengers with mobility challenges). Autonomous vehicle technology is not yet capable of detecting these important considerations of the rider experience, meaning that a human operator on board is necessary to ensure overall safety and passenger accessibility and comfort.
This distinction does not suggest that on-demand or microtransit services are inherently less complex, nor that fixed-route automation is unattainable for passengers with mobility challenges. WRTA’s experience shows that different service models concentrate complexity in different areas. On-demand AV services can face complexity in trip planning and dispatch, but those decisions are largely handled within software systems operating within a constrained service area, and passengers can indicate mobility challenges or other needs ahead of time. By contrast, fixed-route AV services concentrate complexity at the point of passenger interaction, in which real-time sensing, judgement, and accessibility support are critical, but difficult to detect by an AV.
Despite this, fixed-route services still offer long-term advantages for automation in transportation, including consistent routing and opportunities for vehicle-to-infrastructure (V2I) integration. However, current fixed-route AV designs and technologies have not yet matured enough to reliably manage the full range of passenger interactions required for safe and accessible fixed-route transit for passengers with disabilities, as made evident by vendors such as Waymo and May Mobility. These vendors have largely focused their efforts on on-demand deployments. Even within these deployments, widespread accessibility accommodations remain limited.
Vendor Selection
WRTA’s experience highlights how limited vendor selection can be for AV pilots. Early in the project, WRTA faced a major disruption when First Transit and its assets (including technology and fleet) were acquired by Transdev. This change required WRTA to shift its focus to ensuring all WRTA, VTA, and Perrone staff were on the same page in terms of the AV1 project timeline and vehicle operations. Rather than pause the pilot, WRTA and VTA pivoted to preserve the project by partnering with Perrone and integrating AV technology into a more conventional electric vehicle platform. While this shift allowed the project to continue, it introduced new system integration challenges while extending development timelines as the autonomy stack had to adapt to a completely different vehicle.
WRTA’s integration challenges demonstrate another takeaway for other agencies: the importance of seeking collaboration and proven results among vehicle, hardware, and software vendors. After Local Motors’ departure, WRTA absorbed much of the risk of system integration problems and mechanical failures. Working with technology that was still developing placed WRTA in the position of working with a patchwork of vendors until one worked with their system.
The Value of Peer Exchange
WRTA also emphasized the importance of peer exchange as agencies navigate the challenges of planning and deploying AV pilots. The ELATE project’s partnership between WRTA and VTA shows the benefits of collaborative project development. This peer exchange extended beyond the two agencies through the involvement of CALSTART, which led the Connected and Automated Transportation Users Forum (CATUF), a multi-agency effort focused on advancing accessible, small-scale transit AVs. Through CATUF, participating agencies worked collaboratively to define a common set of performance specifications and key parameters for smaller, accessible transit AVs. These shared specifications helped translate early pilot lessons into more concrete procurement guidance and were ultimately used to inform the VTA and WRTA vehicle procurement process. In addition to agency-led-learning, a team of independent evaluators is assessing the ELATE project as a requirement of the AIM program. This evaluation is intended to generate objective findings that can inform future policy and funding decisions, in addition to AV deployments across the US.
By testing the same technology in two very different operating contexts, ELATE enabled both agencies to compare how different elements of their environments, like climate, traffic complexity, and agency capacity can shape AV performance and operational readiness from a single pilot. This cross-context testing created shared insights for common challenges, like vendor readiness and accessibility limitations, as well as contrasting observations related to operating environments, including weather exposure, curb conditions, and traffic interactions. Rather than duplicating efforts through separate pilots, the collaboration allowed lessons from each deployment to inform the other in real time. Ultimately allowing for a stronger project design, more risk management, and clearer expectations at both agencies. This collaboration allowed for lessons from each deployment to inform the other in real time, resulting in a stronger project design, more proactive risk management, and clearer expectations for both agencies.
The Future of AV1
Although the deployment of AV1 has been challenging for WRTA, the effort to introduce automated operations has accelerated the agency’s engagement with advanced vehicle technologies. Even as full autonomy remains out of reach for WRTA and many other transit agencies in the short term, the AV1 project has catalyzed new opportunities for WRTA, including the integration of safety-focused innovations that can improve operations systemwide. As a result of the AV1 pilot, WRTA is exploring opportunities to test additional advanced safety features, including lane-keeping assistance, emergency braking, and adaptive cruise control. AV pilots can catalyze uptake of incremental technological safety improvements even when full autonomy is not yet achievable.
Community Engagement

Credit: Perrone Robotics, Inc.
The community’s reaction to the AV1 pilot has given WRTA valuable insight into how riders may perceive automation in the future. During the brief period of autonomous operation, rider behavior and feedback suggested that the presence of automation was largely invisible to passengers, many of whom experienced the service as a conventional bus rather than a novel technology. This reaction is a positive signal, as the ultimate goal of automation is to normalize seamless and reliable mobility while improving safety, service delivery, and the customer experience. At the same time, this initial reception reinforces the importance of outreach to build public understanding.
Looking ahead, WRTA plans to conduct more deliberate community engagement once the vehicle reaches a consistent level of operability. This strategy includes inviting local elected officials and community leaders to experience the service firsthand, as well as distributing rider surveys to assess perceptions of the service itself, including elements like comfort, safety, and usability.
Conclusion: The Necessary Costs of Early Innovation
Despite the extended timeline required to bring the AV1 service to operational readiness, the project has pushed innovation forward within the agency by directly exposing WRTA to the technical, operational, and accessibility challenges of deploying automated transit. Through this experience, WRTA refined its understanding of what future transit must look like, particularly the continued importance of human support and accessible design when introducing emerging technologies. The effort also catalyzed new opportunities for WRTA to explore and test advanced safety features that could support improvements across the transit network. By working through the challenges of AV pilot implementation in a small urban area, WRTA has contributed to the national understanding of how AV technology can and should evolve.